evtol的发展现状研究 2
evtol的发展现状研究 2
四、典型多旋翼型eVTOL飞行器分析
1、Airbus-CityAirbus
CityAirbus 验证机是空客公司于2015 年启动的,专为城市空中交通而设计的多乘员、自主无人驾驶的电动垂直起降飞行器。CityAirbus 验证机于2018 年开展地面测试,2019年5月实现无人首飞,计划2023年完成取证并投向市场。CityAirbus 原型机如图7 所示,CityAirbus 主要特性信息见表7。
表7 CityAirbus主要特性信息
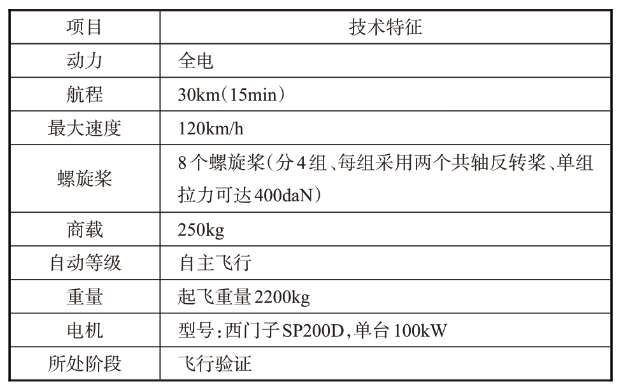
图7 CityAirbus原型机

2、EHang-216
EHang-216由位于广州的亿航智能公司于2018年2月发布,已在美国、荷兰、卡塔尔等国以及中国的广州、烟台等地进行过多次无人及有人飞行,并获得了美国联邦航空局、挪威民航局、中国民用航空局、加拿大交通部4个国家航空监管机构颁发的特许飞行运行许可证。Ehang-216 原型机如图8所示,EHang-216主要特性信息见表8。
表8 EHang-216主要特性信息
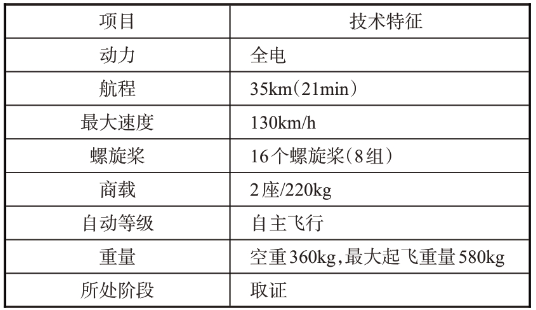
图8 EHang-216原型机

3、Volocopter-VoloCity
德国VoloCity是当今世界上最引人注目的电动垂直起降飞行器之一,它拥有18个螺旋桨,全部呈圆形对称布局。自2011起,已累计完成超过1000次的飞行测试。该型产品计划按照欧洲航空安全局(EASA)于2019年发布的垂直起降飞行器专用技术条件(SC-VTOL)取证,类别为增强型(Enhanced)。VoloCity 原型机如图9 所示,VoloCity 主要特性信息见表9。
表9 VoloCity主要特性信息
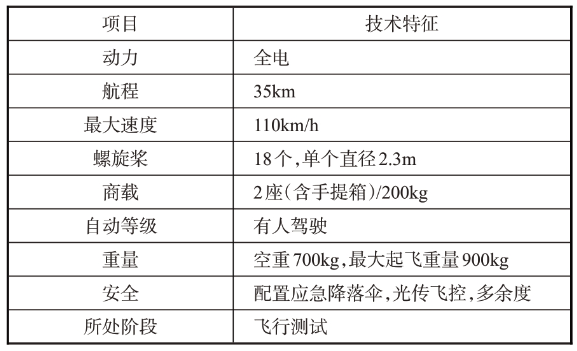
图9 VoloCity原型机

4、Lift-Hexa
Hexa由美国Lift Aircraft公司完成研制,该产品于2018年5 月进行首次飞行测试,同年11 月完成有人飞行。产品按FAA 的Powered Ultralight 类型取证,因而无需飞行员驾照。Hexa 原型机如图10 所示,Hexa 主要特性信息见表10。
表10 Hexa主要特性列表信息
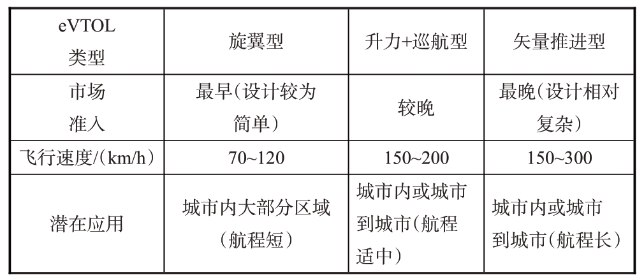
图10 Hexa原型机

五、不同类型eVTOL特点分析
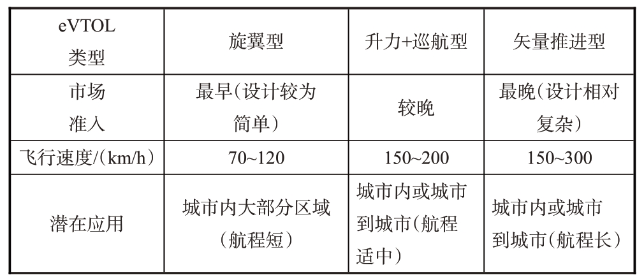
从上述eVTOL飞行器信息来看,不同类别的eVTOL飞行器实现难易程度、飞行速度、航程和应用场景都有所不同。
(1)多旋翼型(Multi-copters)eVTOL 飞行器包含三个以上(含)的旋翼,通过调节转速实现飞行控制,悬停飞行性能较好。由于飞行过程中并没有采用气动力,因而其设计较为简单,但飞行速度慢、载荷小、航程短,仅适用城市内短距离空运。
(2)矢量推进型(Tilt-X)eVTOL 飞行器采用相同的推进装置,以可倾转的方式兼顾悬停和巡航,在不同飞行阶段采用不同的推进方式并存在过渡过程,因而增加了总体设计的复杂性。但是矢量推进型(Tilt-X)可实现更高的飞行速度和更远的航程。
(3)升力与巡航复合型(Lift+Cruise)eVTOL 飞行器融合了固定翼和旋翼飞行器的特征,机翼的设计有利于提升航程,旋翼则便于实现垂直起降。其推进装置各不相同、分开设计,总体性能介于多旋翼型和矢量推进型之间。三种构型的综合对比见表11。
表11 三种构型的综合对比
关键技术分析
一、总体构型选择与多学科设计优化技术
eVTOL 总体上存在上述三种布局形式:多旋翼型、矢量推进型、升力与巡航复合型,且为了提升飞行器综合性能,降低噪声水平,提高安全性,普遍采用了分布式电推进设计技术,使得eVTOL的设计与传统飞行器设计思路完全不同。结合任务使命和性能需求,在方案设计初期需要开展总体构型上的权衡分析及参数设计;综合考虑气动、结构、能源、电机及螺旋桨、适航等设计因素,以提升有效载荷,降低运营成本,确保飞行安全为目标,开展多学科分析与优化设计实现气动、结构、推进、飞控和性能的最佳优化组合。
二、自主飞行控制技术
eVTOL 的商业化前景很大程度上取决于无人驾驶技术的发展。一方面,对于座位数有限的eVTOL 来说,配置驾驶员会显著降低运营经济性;另一方面,eVTOL 驾驶员培训和执照管理也显著影响其商业化进程。因而eVTOL需要实现自主飞行控制,其主要研究内容包括:(1)冗余、多功能操纵面的控制分配与重构;(2)基于人工智能的自主飞行控制和应急着陆控制。其难点主要表现在其飞行区域(以城市上空为主)相对常规飞行器而言约束更多、对自动驾驶的等级要求也更高。
三、态势感知与避障技术
由于eVTOL多是在人口密集、环境复杂的城市上空运营,在此飞行区域实现快速、安全自主飞行,其感知并规避周围危险的能力显得尤为重要,主要包括空间复杂环境下的多障碍物探测(如鸟、无人机、电塔等)和分类、障碍物定位及路径预测与碰撞风险分析、避障策略选择和航线重新规划等技术。这涉及了感知传感器构型设计、多源信息融合、智能目标识别、障碍物危险评估与避障决策等诸多领域,同时还与空域管理、飞行安全规划等政策法规相关,需要开展专项研究。
eVTOL发展展望
一、发展路线图
结合德勤(Deloitte)对eVTOL 行业未来发展态势的分析,考虑到相关技术、适航等因素,提出从2020开始到2030后eVTOL的发展路线,如图11所示。
图11 eVTOL发展路线图
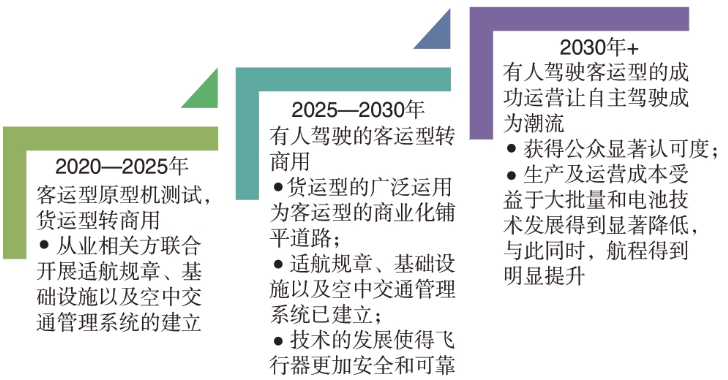
依据eVTOL 载人飞行的成熟度,按照载客和载货(其运行风险相比载客运行要低)两种运营使用模式,可分为三个阶段:
(1)2020—2025 年,实施客运型eVTOL 的原型机测试与验证,实现货运型eVTOL的商业化运行;
(2)2025—2030 年,通过货运型商用铺路,实现有人驾驶客运型eVTOL 的商业化;
(3)2030 年后,依托有人驾驶客运型eVTOL 的商业化成功,伴随民众认可度的显著提升,开展产品升级,实现eVTOL的无人驾驶飞行。
二、主要挑战
尽管eVTOL应用前景广阔,但在进入大众商业化市场之前,还面临着如下几个重大挑战。
(1)技术成熟度:在能量及其管理、自主飞行控制、态势感知与避障等技术领域还需进一步提升;
(2)适航规章:适航审定规章的制定及其符合性方法,以及解决如何运营的问题(包括驾照、空域等);
(3)基础设施:起降场地,停靠、充电及维修、应用管理终端(基于Uber类似的应用)的建立等;
(4)空中交通管理:高效、安全、统一的空中交通管理(面对数量庞大的eVTOL飞行器)包括空域分配、航线管理等;
(5)公众认可:一方面,其便捷性、经济性和安全性还有待时间的检验;另一方面,对于自主飞行器,民众在心理上短时间还难以接受。
结束语
近年来,eVTOL在城市空中交通运输领域的应用受到越来越多的关注,在世界范围内也得到了一些大型公司(如Airbus、Boeing、Uber 等),以及很多初创企业的立项研制,FAA和欧洲航空安全局(EASA)如今已收到不少eVTOL主制造商的适航申请,且EASA 自2019 年起已先后发布垂直起降飞行器的专用技术条件和符合性验证方法,为eVTOL进入商业化提供了准入证。
此外,伴随着无人自主飞控、态势感知与避障等关键技术的突破和电池及能源等产业的发展,eVTOL 自身的成功研制障碍会越来越少,但对于eVTOL进入大众市场开展广泛的商业运营服务,还需结合城市空中交通运输整个生态系统来进行统筹规划和建设,应对配套基础设施、空中交通管理等方面面临的挑战,实现eVTOL产业的安全、环保、高效和可持续发展。