新型环形螺旋桨性能与噪声评价研究
新型环形螺旋桨性能与噪声评价研究
近年来,无人机(UAV)已在世界各地的各种应用中广泛使用。由于螺旋桨是无人机中很重要的组成部分,因此螺旋桨的性能直接关系到无人机的气动性能和噪声大小。随着空中物流和飞行汽车的出现,未来许多无人机将在城市空飞行,螺旋桨噪音是一个很大的问题。因此有必要降低螺旋桨产生的噪音。无人机最大噪音是旋转时切风音以及叶尖涡流音。特别是多个螺旋桨高速旋转时,产生非常大的噪音叠加。以前的研究已经总结了叶片形状对空气动力学性能和噪声带来的影响。近年来,麻省理工学院林肯实验室宣布环形螺旋桨具有低噪音和高效率的特点。同年,JAXA也展示了他们最新的低噪音环形螺旋桨“Looprop”。在此之前,Sharrow Marine公司已经将船舶环形螺旋桨商业化,但无人机环形螺旋桨目前还未被广泛应用。
本研究基于普通螺旋桨,利用CFD进行了数值仿真分析和实验,以研究一种高效、低噪声的新型环形螺旋桨为目标。在本文中,将螺旋桨以恒定的转速(50rps)在静止流体中进行分析,除了环形螺旋桨(L2)之外,还通过比较普通的两叶螺旋桨(B2)和四叶螺旋桨(B4)来评估悬停状态下的空气动力学性能和噪声情况。
螺旋桨模型形状
本研究中使用的螺旋桨如图1所示,图1(a)是一般的2叶片(B2),图1(b)是一般的4叶片(B4),图1(c)是环形螺旋桨(L2)。螺旋桨半径R均为0.15 m,轮毂半径R0为0.03 m。横截面翼型为NACA 4412,迎角αe为7°。从轮毂到翼尖的局部横截面无量纲角度α/αe.和局部横截面无量纲弦长C/R如图2所示。
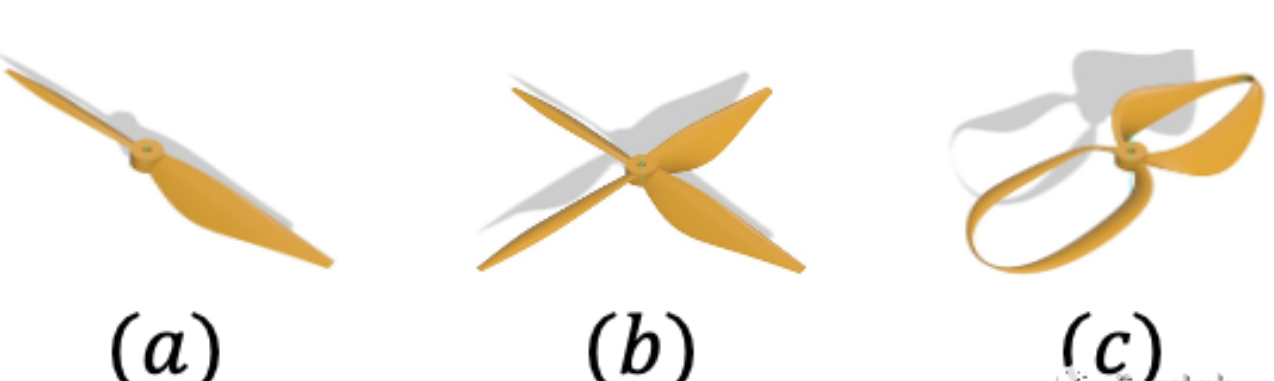
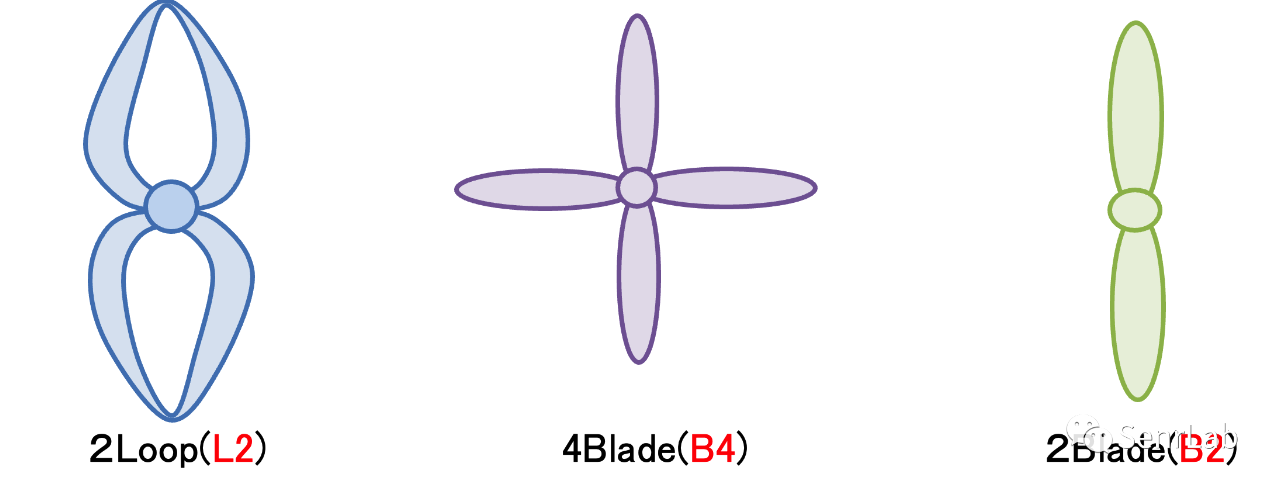
Fig. 1. Propeller model of B2, B4 and L2.
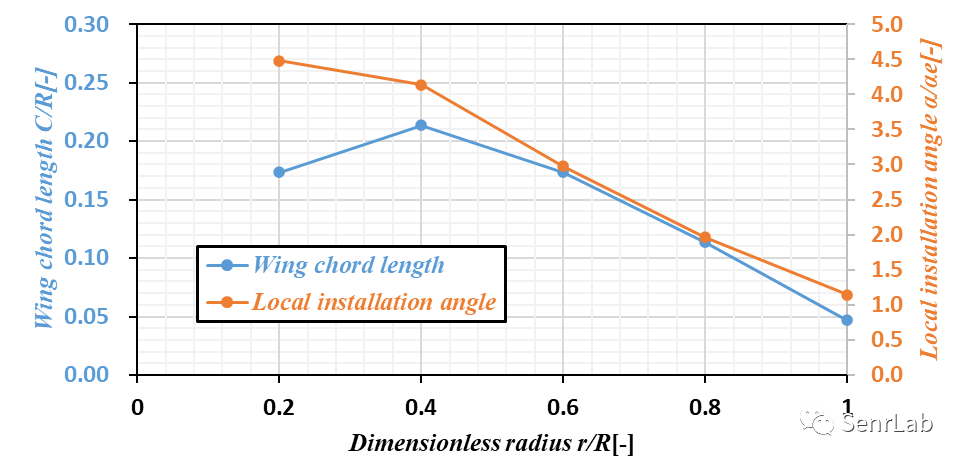
Fig. 2. Local installation angle and Wing chord length.
03,评估螺旋桨静态性能和声压级
01 螺旋桨悬停性能评估
在特定转速下,作用在螺旋桨上的所有载荷都用推力计测量,推力系数CT和力矩系数CM由公式(1)(2)无量纲化,如下所示。
其中R是螺旋桨半径,ω是转速(rad/s),ρ是空气密度,A是螺旋桨旋转平面的圆盘面积。Tz,Mz是通过CFD数值计算和实验测量的推力和力矩。用于评估螺旋桨静止效率的品质因数(Figure of merit,FoM)定义如下式(3)。
02)声压级(Z特性)
声压级(SPL)是噪声的指标之一,以dB(分贝)表示。人类听觉能听到的声压范围很广,为0.00002 Pa-20 Pa,为了方便表示人类听觉感受而使用对数函数的变化来表示,它是由测量的有效声压(Pe)与参考声压P0相比,由以下公式(1)计算。
这里,Lp是声压级,Pe是测得的有效声压,P0表示参考声压(通常为20μPa)。由于测量的瞬间声压p随时间不断变化,为了方便计算,有效声压Pe由公式(2)定义。
在这里,T表示时间。
Z加权声压级是纯声压级的测量值,未通过频率响应进行校正的数值。
04 CFD数值计算方法
本研究中使用的计算格子是使用ANSYS Workbench 2023 R1划分的。图3所示的螺旋桨半径为代表长度R,以半径为1.2 R的球形旋转区域作为计算区域。旋转区外为半径为12 R的球形空气空间,所有边界条件均为大气压力,螺旋桨表面不滑动壁面。螺旋桨的固定转速为50 rps,计算点在半径为2R的位置。为了计算螺旋桨周围的流场,把大气区域中划分了约503万个格子,螺旋桨周围的旋转区域约211万个格子,总网格点约为714万个。最小网格长度在螺旋桨壁,约为0.8毫米。
使用ANSYS CFX 2023 R1商用计算软件进行计算,采用LES湍流模型,时间步长Δt=5×10^-5。除了叶片通过频率分量的噪声外,通过增加叶片表面附近的格子分辨率可以在一定程度上捕获宽带噪声的特性。
对于流体噪声源,叶片转速即额定转速 (f = 50 Hz)下的最大风速为 Vmax=2πRf[m/s]。在这种情况下,基于叶片外径的雷诺数为4.2×10^5,马赫数为Vmax/c 因此,双极声源作为流体噪声源占主导地位。因此,我们重点关注计算点的压力波动,并使用LES估计了湍流引起的压力波动。
将推力和力矩Tz和Mz的结果代入式(1)(2)和(3)可以计算出推力系数CT,力矩系数CM和品质因数(FoM)。然后,将计算点的压力计算结果p代入式(4)和(5),即可计算出声压级。
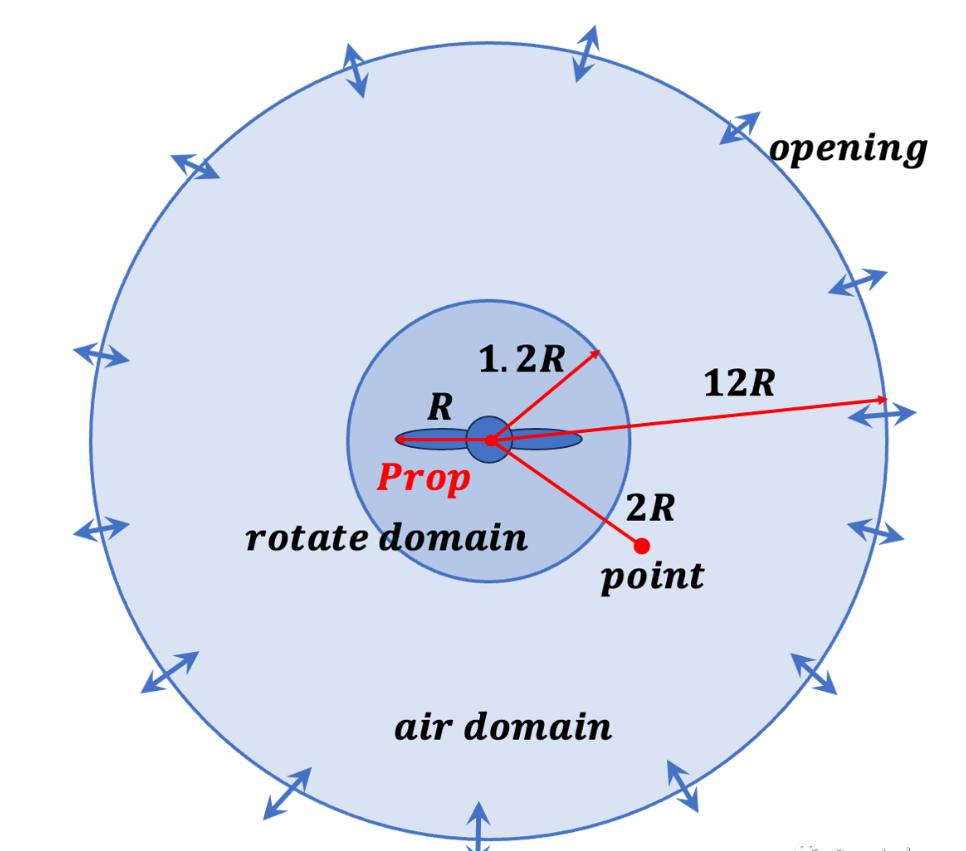
Fig. 3. 3D Caluculation domain.
05 实验方法
实验设备的示意图如图4所示.实验中使用的电机CR23)由Cy-Captain制造,是一种无刷电机。螺旋桨模型如第2节所示,使用PLA树脂3D打印制作。使用伺服仪(NOVATECH,N-B608)通过直流稳定电源(DPS-3003,由CUSTOM制造)发送的恒定电压。信号发送到ESC(X-12Pro,由Hacker Motor GmbH制造)以控制电机的转速。使用声级计(NL-42)和麦克风,设定20000 Hz的采样频率进行10秒的录音。螺旋桨以 50 rps 的转速旋转。测量点位置的径向无量纲距离r/R = 2。如图4中的红色×所示。
将推力和力矩Tz和Mz的实验值代入方程(1),(2)和(3),可以计算出推力系数CT,弯矩系数CM和品质因数(FoM)。这里的推力值Tz和螺旋桨功率P可以直接从推力计看到,力矩值可以通过公式Mz = P/ω计算。
由于麦克风记录的数据是电压E,因此需要使用声级计的结果进行校准。假设校准因子为S,则声压p = ES。然后,将声压p代入等式(4)和(5),计算声压级,并使其与声级值相同,得到校准因子S,这里S = 6.5。
Fig. 4. Schematic of experimental equipment.
06,CFD数值分析和实验结果
01)悬停性能品质因数
B2、B4和L2的推力系数、力矩系数和悬停效率品质因数分别如图5、图6和图7所示。蓝色为实验结果,红色是CFD仿真结果。总体而言,实验结果与CFD结果之间的差异在5%以内,因此在定性上是一致的。图5显示,L2和B4的推力系数几乎相同,但为B2的1.58倍。L2有两个环形叶片,所以实际上与B4相同,都是四个叶片,因此推力系数几乎相同。图6所示L2的力矩系数是B4的0.85倍,B2 的1.7 倍。因此L2 是图 7 所示悬停效率品质因数中最高的,其次,B4为0.52,B2为0.5。
图8表示B2、B4和L2叶片周围的涡流,观察到了B2和L2的2个叶片尖端涡流,以及B4的4个叶片尖端涡流。因此可以认为环形螺旋桨L2在同样4片叶片的前提下,由于叶尖涡流较少一半,力矩系数也大大减小,从而使其悬停效率品质因数增加。
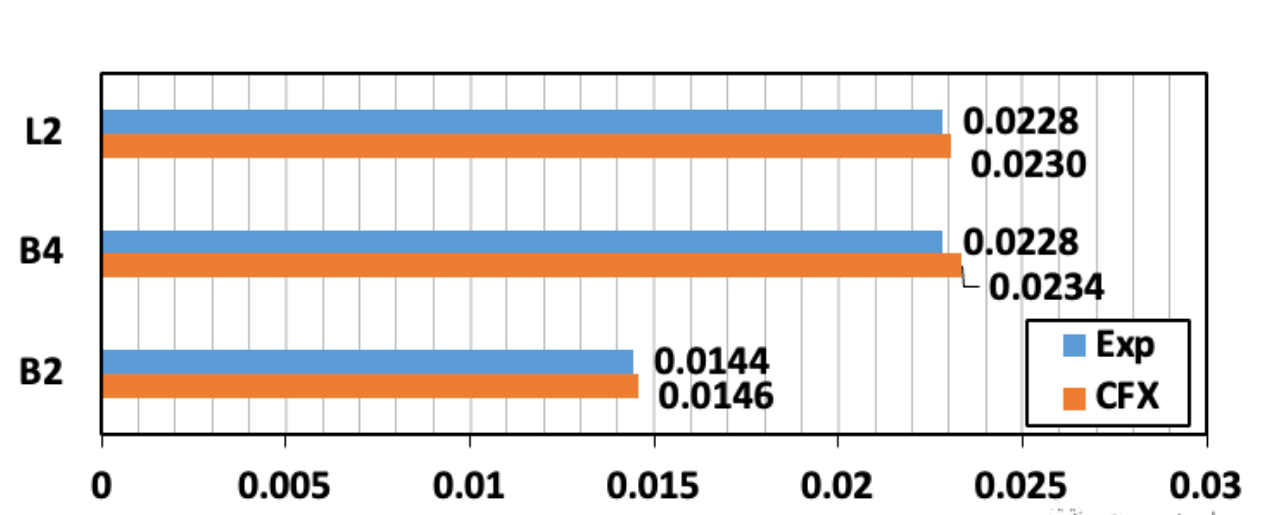
Fig. 5. Thrust coefficient of B2, B4 and L2.
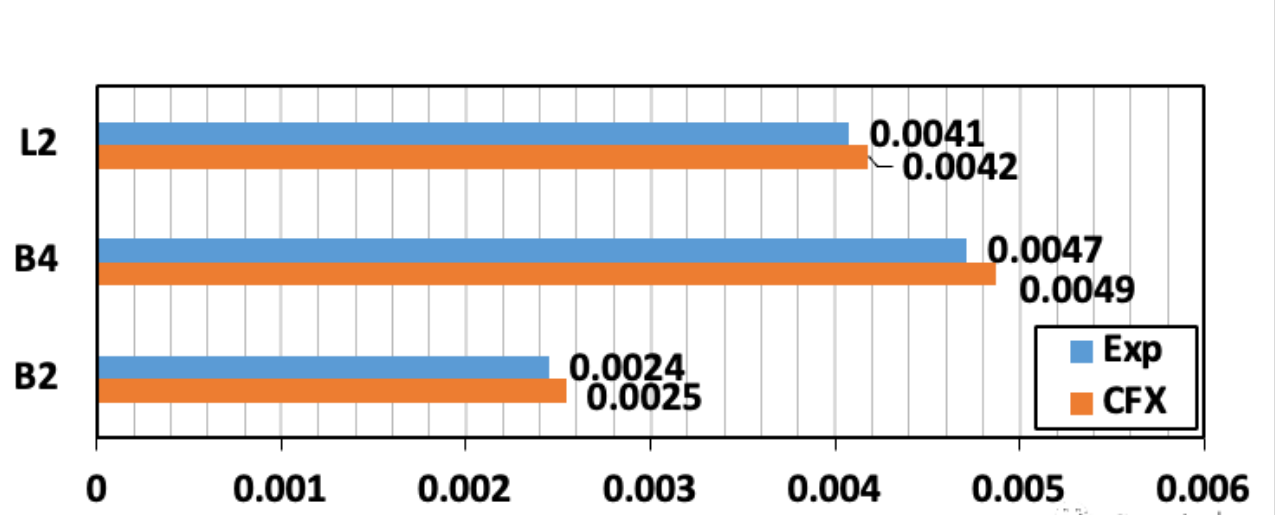
Fig. 6. Moment coefficient of B2, B4 and L2.
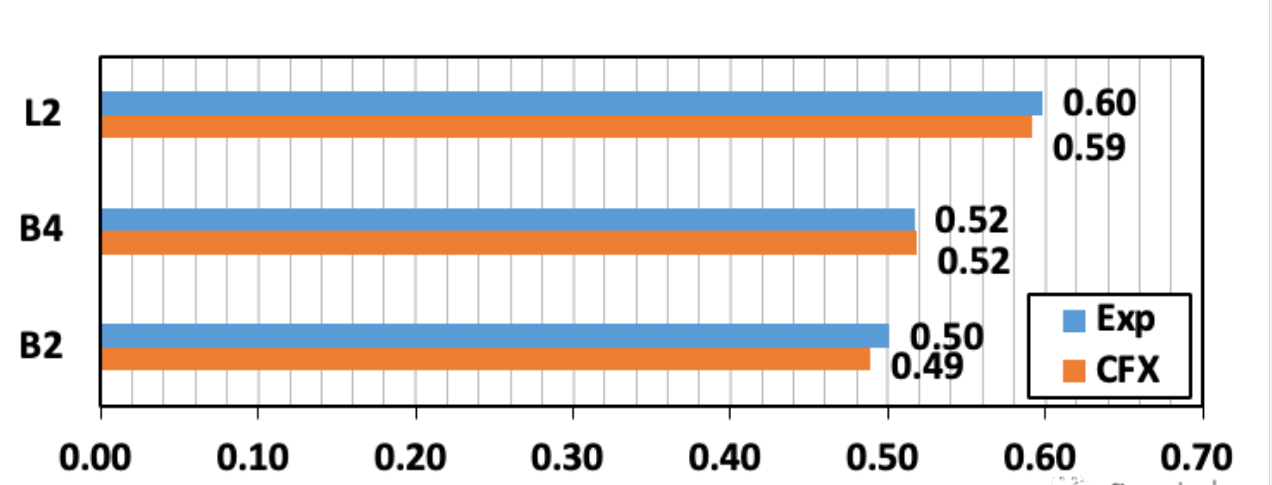
Fig. 7. Figure of merit of B2, B4 and L2.
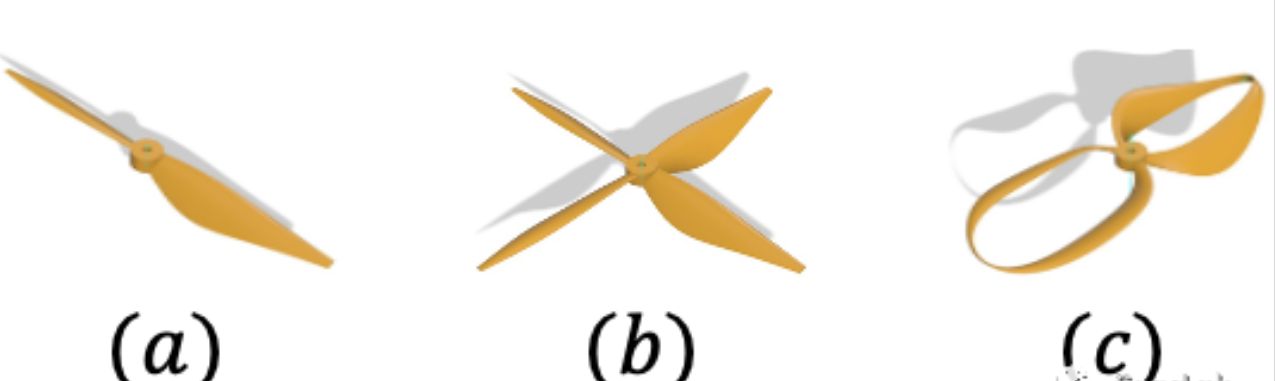
Fig. 8. Spatial Q value around B2, B4 and L2.
02),Z 加权声压级评估
由于图9的(a),(b)和(c)分别是B2、B4和L2的瞬时声压级可视化图,并随时间变化,瞬时声压级由公式(4)和(5)计算,结果如图10所示。图10表示了B2、B4和L2声压级的实验和CFD结果,蓝色为实验结果,红色为CFD结果。总体而言,实验结果与CFD结果之间的差异在4%以内,因此它们在定性上是一致的。由图10可看出B4的声压级最小,实验和CFD的平均为78.9 dB。其次,B2的平均分贝为83.7dB,L2最大,平均为86.2dB。
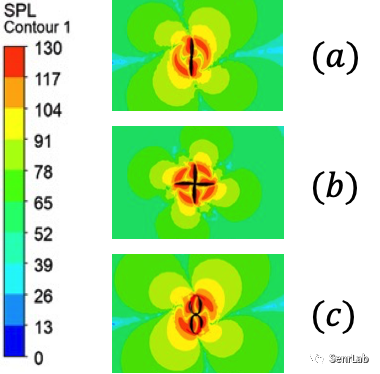
Fig. 9. Instantaneous Sound Pressure Level of B2, B4 and L2.
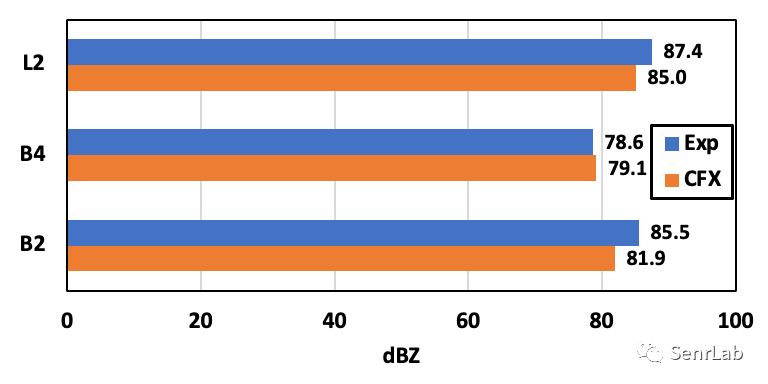
Fig. 10. Z-weighted Sound Pressure Level of B2, B4 and L2.
07 结论和未来展望
在这项研究中,我们通用螺旋桨B2和B4以及环形螺旋桨L2的悬停效率品质因数和z加权声压级。在转速为50rps的情况下,L2的悬停效率品质因数最高,但声压级也高达86dB,比一般螺旋桨的噪声更大。并未达到降噪的预期。
在这项研究中,我们使用Z加权声压级进行评估,Z加权声压级仅通过物理声音进行评估,而不考虑人类的听觉范围的影响,因此接下来我们计划导入心理声学并根据人类听觉感受对其进行评估。
08 参考文献
Toroidal Propeller Research Team, Toroidal Propeller, MIT Lincoln Laboratory (2023-2).
Shima, E. Tsutsumi, S. and Fujimoto, K., Preliminary Study on Innovative Loop Propellers for Quiet EVTOL. In Proceedings of the 8th Asian/Australian Rotorcraft Forum, Ankara, Turkey, 30 Oct. –2 Nov. 2019.
Jianwei, S. Koichi, Y. Eiji, S. and Hao, L. Integrated Evaluation of the Aeroacoustics and Psychoacoustics of a Single Propeller. Chiba University. January. 2023.
吉川 茂, 和田 仁, 音源の流体音響学, 日本音響学会編, pp. 123-131.