四倾转旋翼无人飞行器倾转旋翼系统模块化设计方法研究 (下)
倾转旋翼系统操纵控制
一、旋翼桨距控制
倾转旋翼系统变桨距控制结构与直升机相同。节点控制器收到主控器发来的通道控制量后,按操控策略分配处理得到旋翼的总距、纵横向周期变桨距,协同作用于自动倾斜器不动环下的3个舵机,使自动倾斜器十字斜盘产生左右、前后及上下运动,带动动环上的变距拉杆,致使旋翼桨距改变,旋翼气动力大小和方向发生变化,四倾转旋翼飞行器由此产生运动变化。
倾转旋翼系统自动倾斜器舵机布局为120°均布。以1 号节点倾转旋翼系统为例,0 号舵机在Y轴上,1 号、2 号舵机位于前后两侧。旋翼总距、纵横向周期变距与3 个执行舵机桨距当量值关系为
式中:δ0,δ1,δ2 为0~2 号舵机的桨距控制当量值;δc,δe,δa 为总距、纵向周期变距、横向周期变距。
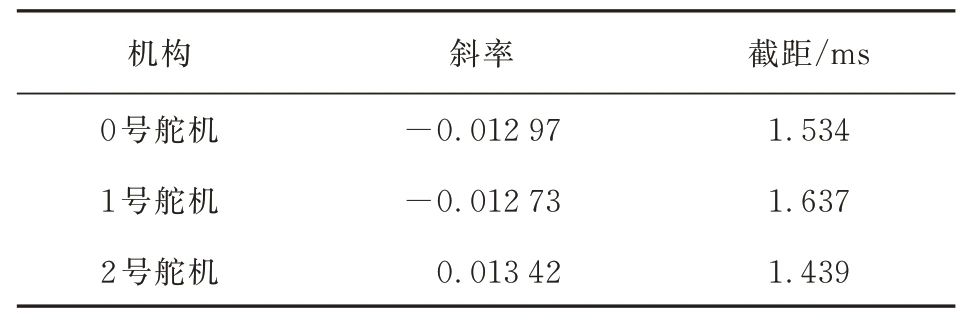
舵机桨距当量值与PWM 脉宽控制量间关系由桨距标定得到,根据实验数据经线性拟合处理得到标定公式的斜率和截距参数。某一标定实验数据样例如图8 所示,对应标定结果参数如表5 所示。
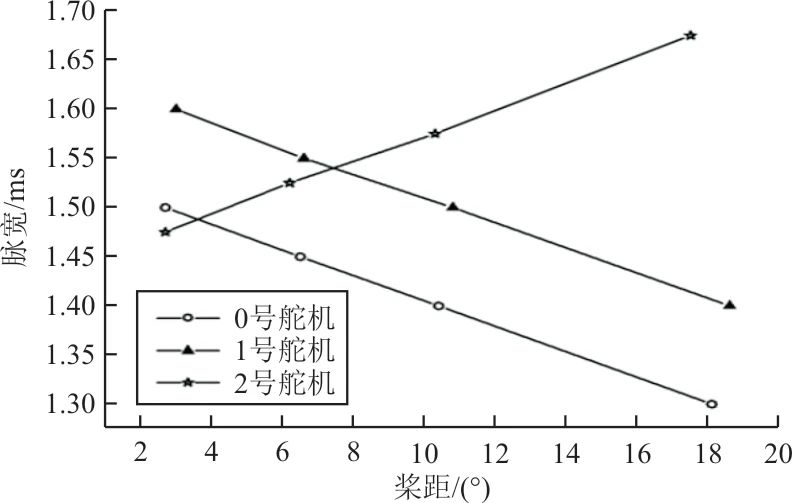
图8 桨距标定实验数据
表5 桨距标定参数
二、旋翼转速控制
旋翼转速控制系统闭环控制结构方块图如图9 所示,其中r(t) 为给定目标转速,n(t)为实际转速,c(t)为测量转速,e(t)为转速误差量,带积分饱和的位置式离散PID 控制律控制,公式如式(2)所示。
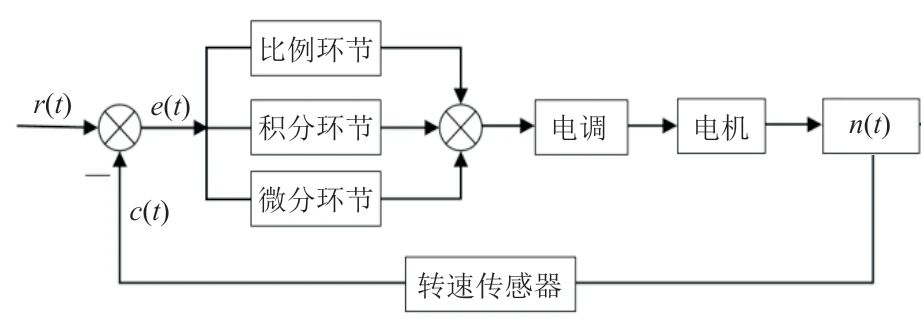
图9 转速闭环控制结构

式中:N 为积分饱和极限值;T 为控制周期。
倾转旋翼系统节点控制器输出PWM 信号至电子调速器控制电机转速,旋翼测量转速作为负反馈信号实现转速闭环控制。旋翼转速测量信号取自电机输入信号激磁电压信号频率,由Hobbywing 转速传感器感应。经三极管导通截止得到激磁电压方波信号,由嵌入式处理器的外部中断机制捕获方波信号跳变沿,并记录跳变沿周期内的脉冲数,结合电机参数转换为旋翼电机转速,如式(3)所示。

式中:fval 为电机转速;P 为电机磁极对数;Z 为旋翼齿轮减速比;fPWM 为PWM 周期脉宽计数值。
三、旋翼倾转控制
旋翼系统倾转由伺服电机经涡轮蜗杆减速实现,倾转伺服电机控制结构如图10 所示,θc(t)为倾转角度控制指令,通过主控制器经由CAN 总线发送给倾转旋翼系统节点控制器,θs(t)为旋翼系统实际倾转角度,由数字式增量式编码器测得,并以脉冲形式反馈传输至电机驱动器,电机驱动器将获得的当前倾转角度控制值与实际测量值的差值θe(t)经控制律计算实现精确的位置或速度控制。
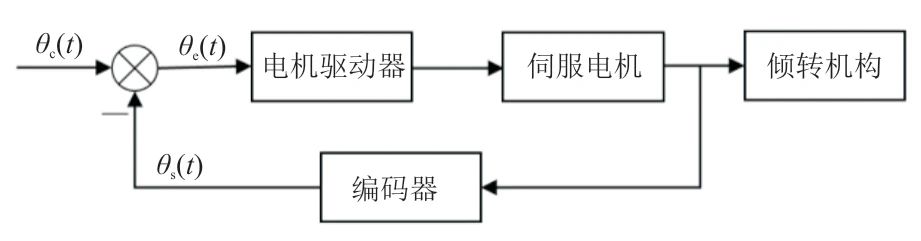
图10 倾转过程控制结构
旋翼系统倾转角指令随无人飞行器前飞速度变化,决定着倾转过渡飞行模式。直流伺服电机驱动控制器设置为位置控制模式,实现倾转角度位置闭环控制。同时把实时电流、倾转角速率以及倾转角度反馈给节点控制器,直至发送到主控制器,供地面站监视。
倾转旋翼系统模块化实现验证
一、验证系统组成
倾转旋翼系统模块化实现验证系统如图11 所示,其中四倾转旋翼无人飞行器的1 个节点系统用于验证系统结构、控制和通信,节点倾转旋翼系统指令来自指令操控台,经由地面站发送给主控制器,主控制器再通过CAN 总线通信发送到倾转旋翼系统的系统节点控制器,由节点控制器完成操控分配,与实际飞行器实现一致。

图11 倾转旋翼系统验证系统
验证系统由指令操控平台、地面站、倾转旋翼系统及其控制器、功率采集板、六分量天平及其数据采集器等组成。功率采集板由电压传感器、电流传感器和相关电路组成,节点控制器采集旋翼电机的电压和电流模拟信号,获取旋翼输入功率。数据采集器实现六分量天平数据的采集、调理及传输,由RS232 总线通信把数据传输给节点控制器。
地面站用户监控软件实现与主控制器的实时交互,无线数传电台传输相关数据到主控制器,控制倾转旋翼系统运动变化,用户监控软件实现旋翼电机动力电压、电流、旋翼转速、旋翼系统倾转角速率、倾转角度以及六分量天平的力和力矩等信息的实时监视。地面站用户监控软件采用Access 数据库和WPF 技术通过C#语言设计开发完成,具有数据实时通信、帧解析、存储等功能。
二、验证试验与结果分析
1、旋翼电机转速控制与电流监视
倾转旋翼无人飞行器旋翼转速在飞行过程中为额定值。为验证在机动飞行中旋翼转速控制效果,给定旋翼电机额定转速,模拟机动飞行过程中总距发生的变化,地面监控软件记录旋翼电机实时转速以及电机电流。经实验调试,最后确定旋翼电机转速控制参数T=10 ms,Kp=0.000 2,Ki=0.000 038,Kd=0.000 1,结果如图12~图13所示,可以看出:单节点倾转旋翼系统的旋翼转速控制响应在期望转速1 550 rad/min 上下波动,波动范围在2.6%以内,说明本文设计的带积分饱和位置式PID 控制律控制效果良好,具有一定的抗干扰能力,电机电流随着总距增加呈增大趋势。
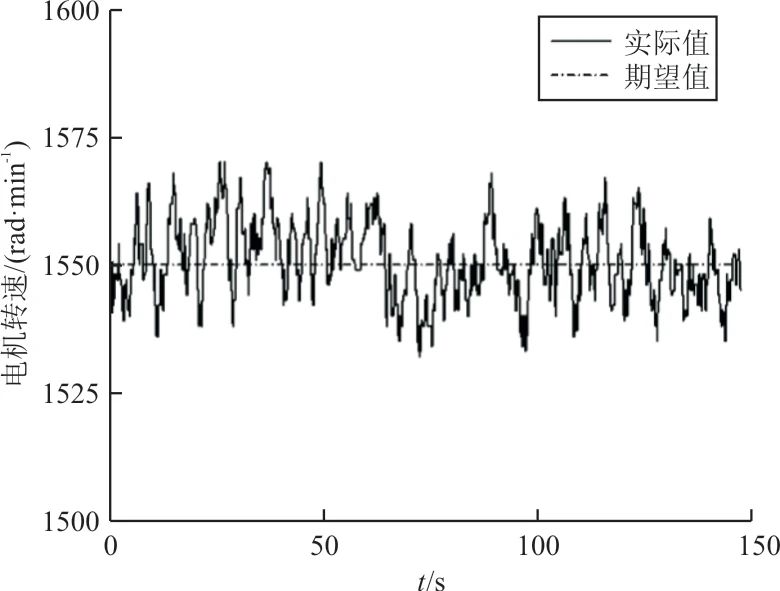
图12 旋翼转速控制响应
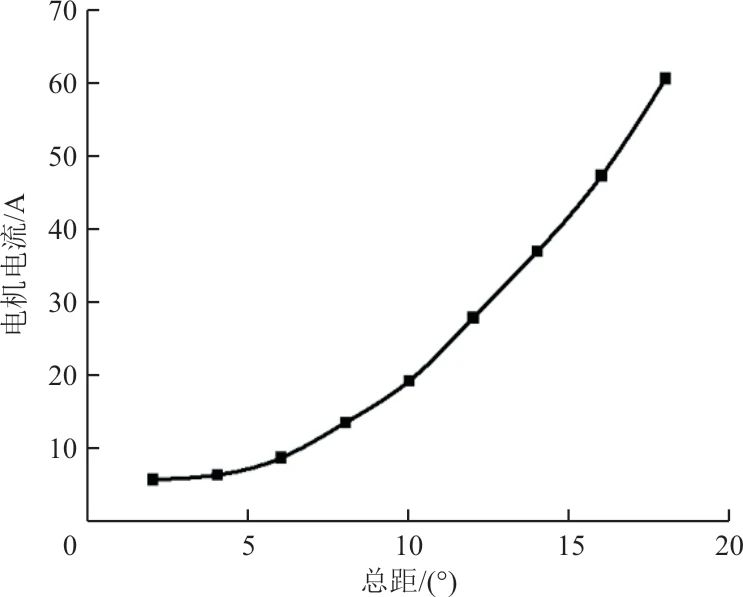
图13 旋翼电机电流随总距变化
2、旋翼倾转控制与状态量监视
四倾转旋翼无人飞行器从直升机模式控制转变为固定翼模式,验证旋翼系统倾转控制效果。倾转电机驱动器为位置控制模式,倾转通道控制量δtil 由操控平台指令发出,通过地面监控软件发送给主控制器,节点控制器由CAN 总线通信机制接收主控制器发来的倾转通道控制量δtil,倾转状态量发送给主控制器供地面监控软件监视,一组旋翼倾转控制实际结果如图14 所示。
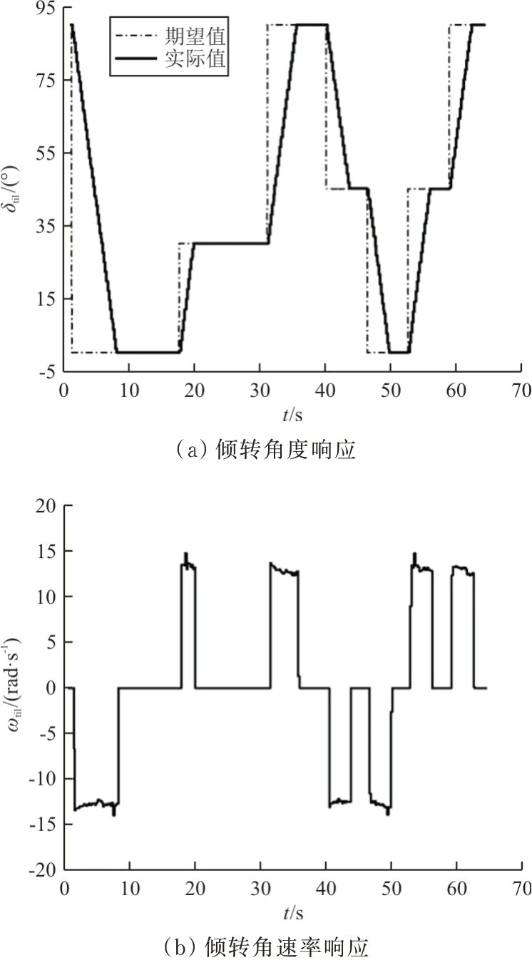
图14 倾转控制响应
从图14 可以看出:旋翼系统由直升机模式控制转换到固定翼模式可以在7 s 左右实现平缓匀速过渡,倾转角速率基本平稳,波动在1.8 rad/s 内,倾转角度随动闭环控制效果良好。
3、垂向通道控制与气动力测量
在直升机模式下,横向通道和纵向通道控制量为0 时,总距控制即为倾转旋翼系统垂向通道控制,其变化决定着倾转旋翼系统的功率需求和气动力变化规律。验证系统气动力测量有助于分析倾转旋翼系统的功率需求。改变垂向通道控制量,试验测量倾转旋翼系统气动力变化,垂向通道旋翼孤立试验实物图如图15 所示,两侧钢板将倾转旋翼系统固定在试验架上,底部装有六分量天平。试验时旋翼额定转速为1 600 r/min,垂向通道控制量分别为3°、6°、9°、12°、15°,试验得到旋翼输入功率与拉力的变化规律如图16 所示,图中计算值参考文献[6]计算得到,可以看出:试验测量值与理论计算值吻合度较好,说明本文设计的分布式控制系统可行,功率需求和气动性能满足系统要求。
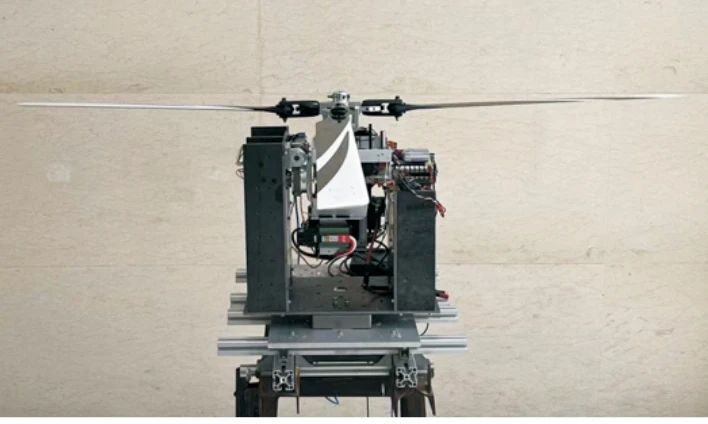
图15 垂向通道孤立旋翼试验实物图
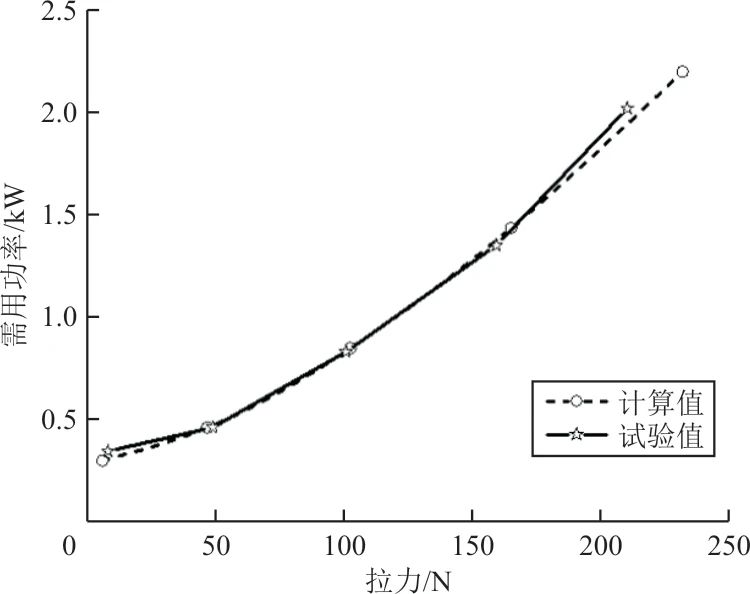
图16 旋翼输入功率与拉力变化
结 论
1) 应用带积分饱和的位置式离散PID 控制律设计的旋翼电机转速控制系统,总距变化情况下能保证转速控制效果,转速波动误差小于2.6%,抗干扰能力强,满足控制性能指标要求和工程实际需要。
2) 倾转角度闭环控制系统可在7 s 内实现由直升机模式到固定翼模式的平缓匀速过渡,倾转角速率平稳,控制效果良好。
3) 垂向通道控制量直接影响着倾转旋翼系统输入功率要求和拉力变化,尤其是直升机模式。准确的桨距控制系统及其操纵策略能满足四倾转旋翼飞行器通道控制性能要求。
4) 验证系统试验有效验证了基于CAN 总线通信机制的可行性。主控制器与节点控制器间的高速实时通信,保证了四倾转旋翼无人飞行器各部件间可靠数据通信,为成功研制提供了技术手段和途径。同时,本文采用的模块化设计方法可行,满足倾转旋翼系统的应用需求。