垂直起降固定翼无人机技术发展及趋势分析 (上)
垂直起降固定翼无人机具有对起降场地要求低、机动性好、巡航速度高、航时长等优势,是目前航空领域研究热点。本文阐述了国内外现有垂直起降固定翼无人机研究现状和基本特征,详细分析了不同类型垂直起降固定翼无人机的技术特点,提出更高的飞行速度、更长的续航时间、更强的任务载荷能力将是未来垂直起降固定翼无人机技术的主要发展方向和必然趋势。尽管倾转旋翼式和尾座式仍是当今垂直起降固定翼无人机主流构型,但基于分布式电推进的高速垂直起降固定翼无人机技术将成为未来航空领域新热点,给出进一步加强对垂直起降固定翼无人机新构型、新原理的探索性研究的建议。
引言
垂直起降固定翼飞行器能够以直升机方式垂直起降,并能以固定翼方式巡航前飞。与传统直升机相比较,垂直起降固定翼飞行器具有前飞速度快、航程远、航时长等显著优势,而与常规固定翼飞行器相比较,垂直起降固定翼飞行器能够定点起降和悬停,对机场跑道没有依赖,任务能力显著增强。以上优点促使该类飞行器成为当今世界研究的热门领域。从2004年起,美国已经针对垂直起降固定翼飞行器技术布置并开展了系列研究和验证,包括联合多任务旋翼机(JMR)技术验证项目、未来垂直起降飞行器(FVL)项目、垂直起降试验飞机(VXP)项目、战术侦察节点(TERN)项目、海军陆战队空地特遣部队远征无人机系统(MUX)项目等,而在上述项目的带动下,美国垂直起降固定翼飞行器技术实力得到了显著提升,同时也积累了大量工程经验,对未来高效垂直起降固定翼飞行器装备发展提供了有力支撑。
近年来,随着无人机在军事、民用领域的用途越来越广泛,对无人机起降方式的要求也越来越多样化,因此,将垂直起降技术应用到无人机上已经成为必然。由于无人机无需考虑飞行员的生命保障、生理极限等问题,将垂直起降技术应用于无人机领域将更为灵活,且更容易实现。
本文首先阐述国内外垂直起降固定翼无人机研究进展,然后分析不同种类垂直起降固定翼无人机方案技术特点,最后讨论垂直起降固定翼无人机技术的发展趋势。
垂直起降固定翼无人机技术研究进展
与有人机相比,无人机系统组成更为简单,更适合垂直起降技术应用和发展,按照总体构型及动力形式的不同,可以将目前主流垂直起降固定翼无人机划分为升推复合式、尾座式、倾转动力式3种构型形式。
一、升推复合式垂直起降固定翼无人机
升推复合式垂直起降固定翼无人机大多直接在固定翼的基础上加装多旋翼或升力螺旋桨,在垂直起降阶段由多旋翼或螺旋桨系统提供升力,在平飞阶段则切换回固定翼模式。Rheinmetall Airborne Systems公司与Swiss UAV公司于2016年联合研制的TU-150战术多用途无人机应用“双复合”设计,如图1所示,即旋翼—固定翼复合和混合动力:两侧翼尖各装配一副三叶旋翼来提供垂直升力,使其在旋翼模式下具有直升飞行能力;而在固定翼模式下,将旋翼停止,靠机翼升力平衡重力,由机身末端电机驱动的推进螺旋桨提供前进推力。TU-150垂直起降固定翼无人机的设计目标是“具有低保障要求的高性能系统”,其最大起飞质量约为140 kg,最大任务载荷质量约为25 kg,可配装多种传感器,能够执行多种任务,最大飞行速度约222 km/h,续航时间约8 h。其他如Songbird无人机,CW大鹏系列无人机等也是采用类似方案。

图1 TU-150战术多用途无人机
为了进一步提高垂直起降固定翼无人机效率,设计人员提出了一种“在巡航时将旋翼停转并锁定,进而转变成机翼或其他翼面以提供气动力”的旋转机翼创新思路,进而形成一种特殊的升推复合式垂直起降构型。美国波音公司鬼怪工厂于2003年研制的X-50A“蜻蜓”概念验证机即采用“旋转机翼+鸭翼+尾翼”布局形式,如图2所示,其垂直起降和悬停时的飞行模式与直升机相似,但其旋翼旋转运动是依靠“桨尖喷气驱动”技术实现,而抗自旋扭矩则是通过“无尾桨”系统实现。当无人机进入固定翼模式,旋翼停变为主机翼以提供巡航升力,相类似地如西北工业大学于2006年提出的“灵龙”无人机,如图3所示,其与X-50A“蜻蜓”概念验证机主要区别在于机身尾部加装反扭矩尾桨,并且固定翼飞行状态采用机头拉进螺旋桨而非喷气推进装置。

图2 X-50A“蜻蜓”概念验证机

图3 “灵龙”无人机概念图
二、尾座式垂直起降固定翼无人机
尾座式垂直起降固定翼无人机是将动力系统固连在机体上,并随全机整体偏转的一种特殊布局无人机。该类型无人机将起落架安装在尾部,起飞时,全机纵轴垂直地面从而“坐地”起飞;当满足一定的高度和速度条件后低头过渡进入固定翼巡航模式;降落前需全机抬头恢复“坐地”姿势后垂直降落。
目前该类型无人机代表机型包括Aerovel公司于2012年研制的弹性旋翼尾座式无人机(如图4所示)、美国诺格公司2015年提出且目前正在研制的TERN“燕鸥”尾座式无人机(如图5所示)以及国内航空工业成都飞机工业有限责任公司2016年于第十四届中国西部国际博览会展出的VD-200尾座式无人机(如图6所示)等。其中TERN“燕鸥”尾座式无人机采用飞翼布局,前置大型对转螺旋桨,而根据DARPA的设想,TERN“燕鸥”尾座式无人机可以于5级海况下在驱逐舰或更小的舰船上垂直起降。

图4 弹性旋翼尾座式无人机

图5 TERN尾座式无人机概念图

图6 VD-200尾座式无人机
三、倾转动力式垂直起降固定翼无人机
倾转动力式垂直起降固定翼无人机是指无人机在垂直起降和平飞过程中按需求对动力部件进行向上或向前的倾转。传统倾转动力式垂直起降固定翼无人机主要包括倾转旋翼和倾转涵道两种形式,是目前国内外各军种垂直起降固定翼飞行器的主流构型。但随着近年来分布式电推进技术、分布式动力的发展,倾转分布式动力的垂直起降形式逐渐兴起,已成为国内外研发重点。
(1)倾转旋翼式
倾转旋翼式垂直起降固定翼无人机技术发展较早,其最具代表的机型是美国V-22舰载无人机“鹰眼”,如图7所示。“鹰眼”无人机与V-22无人机的总体布局十分相像,都采用中单翼布局,双垂尾内倾,两副旋翼由机身内部的一台发动机驱动,推力转向则是通过翼尖旋翼的倾转来实现。

图7 “鹰眼”倾转旋翼式无人机
在继承V-22、“鹰眼”成熟技术的基础上,美国贝尔公司于2019年又提出了V-247“警惕”倾转旋翼无人机方案(如图8所示),其采用的呈纺锤体的机体外形使全机趋于流线型,且将发动机固定安装于机身内,缩小了旋翼短舱截面,有效提高了全机阻力特性。同时为进一步提高全机续航性能,V-247“警惕”无人机在旋翼短舱外侧特别增加了一段机翼设计,有效提高了机翼展弦比和升阻比。

图8 V-247“警惕”倾转旋翼式无人机概念图
此外,采用倾转旋翼式方案的还有以色列2012年研制的“黑豹”和韩国2017年研制的TR-60垂直起降固定翼无人机,如图9~图10所示。

图9 “黑豹”倾转旋翼式无人机
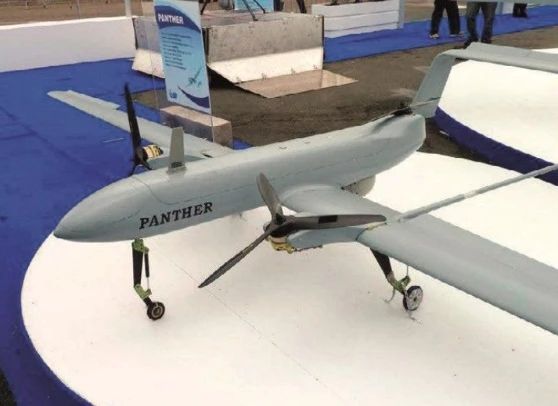
图10 TR-60倾转旋翼式无人机
(2)倾转涵道式
倾转涵道式垂直起降固定翼无人机的垂直起降方式与倾转旋翼式相同,不同之处是将旋翼换成了涵道,这种几何特征上的改进使得动力部件可以更好地融入机身/机翼中。Project Zero倾转涵道风扇验证机于2010年开始研制,采用飞翼布局,如图11所示,包括可拆卸机翼和中央翼,其中央翼面积很大,于两侧各开有一个圆环以安装内埋式涵道风扇,并通过安装罩上装有的转轴按任务需求绕机身横轴进行倾转。

图11 Project Zero倾转涵道式无人机
美国波音公司鬼怪工厂于2016提出的“幽灵雨燕”倾转涵道式无人机,如图12所示,由四个涵道风扇共同提供动力,垂起状态下由机身内埋涵道提供主要升力,翼梢涵道向上倾转提供辅助升力,前飞状态下机身风扇及其盖板关闭,翼梢涵道向前倾转提供前飞动力。

图12 “幽灵雨燕”倾转涵道式无人机概念图
(3)倾转分布式动力结构
倾转分布式动力结构垂直起降固定翼无人机与倾转旋翼、倾转涵道的最大区别在于其分布式动力部件与机翼的融合度或一体化程度相对更高,且需要利用位于机身内部的倾转机构操纵机翼/动力融合体的旋转运动来实现推力转向。其外形特征与倾转机翼式垂直起降飞行器相类似,但本质上仍是倾转动力的一种特殊体现。NASA兰利中心于2015年推出了GL-10闪电无人机,如图13所示。采用分布式螺旋桨—固定翼常规布局形式,利用机翼上8个螺旋桨和平尾上2个螺旋桨共同驱动实现垂直起降和前飞,目前已经过多次验证飞行,证明了分布式电推进技术应用于垂直起降飞机具有十分明显的优势,借助于分布式螺旋桨与机翼的一体化设计,全机功重比有效提升,同时电机在整个转速范围内都有较高的效率,且全机巡航阶段飞行的可靠性明显提升。理论上GL-10无人机综合效率能够达到常规直升机的4倍,但其不足之处在于全电驱动下飞行航时相对较短,预计后期采用油电混合动力后此问题可以得到改善。

图13 GL-10“闪电”分布式动力倾转机翼验证机
美国极光飞行科学公司针对VXP项目联合罗罗公司和霍尼韦尔公司于2016年推出的XV-24“雷击”无人机,如图14所示,致力于将垂直起降飞行器的飞行速度在现有基础上提升50%。“雷击”无人机采用鸭翼布局的倾转分布式动力/机翼融合体设计,由1台罗罗公司的AE1107C涡轴发动机驱动,通过3台霍尼韦尔公司的发电机产生电力,进而驱动全机共计24个变距涵道风扇(机翼18个、鸭翼6个),2017年4月,项目团队完成了1∶5缩比验证机试飞,验证了分布式电推进系统、倾转分布式动力等设计的可行性。尽管该项目由于在研发高性能1兆瓦级发电机热管理方面遇到技术瓶颈、没有找到合适军方合作伙伴等原因被取消,但XV-24“雷击”无人机所采用的分布式混合电驱动变距涵道风扇、创新的同步电驱动系统、用于垂直起降的可倾转的分布式动力/机翼融合体,具有高效的悬停/平飞双模态适应性等特点,让其被誉为最具革命性的新型未来垂直起降飞机。

图14 XV-24“雷击”分布式动力倾转机翼验证机